
当我想到像BigDog或 斯坦福大学的最新消息 很难不将它们与猫,狗等四足动物相提并论。
实际上,在过去的几年中,四足机器人已经开始在一些非常特殊的情况下(例如步行而不会摔倒)接近其生物学对手的能力。
大自然提供了机器人试图达到的黄金标准,要创造出能够完成动物所能做的一切的四足动物需要花费很长时间。
但是,关于机器人的好处是,它们不必受到生物学的束缚。总有可能学习动物根本不适合的新行为。
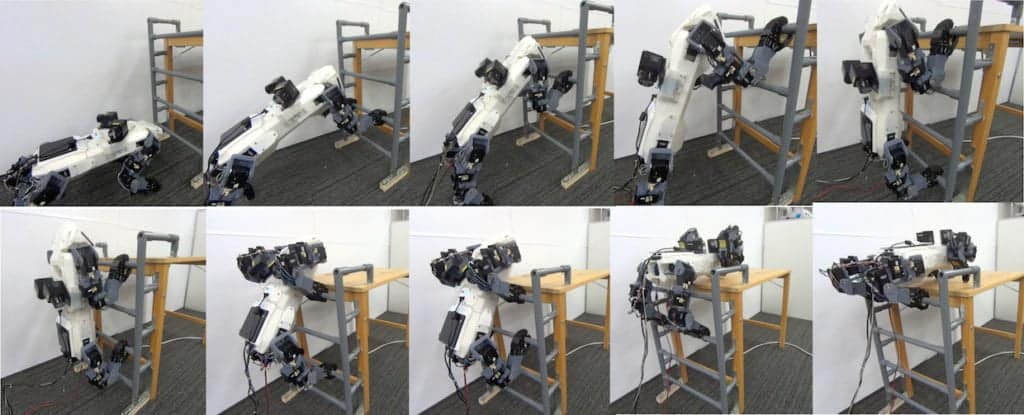
上周在 IROS 2019 上,我们看到了这样一个例子,四足机器人能够攀爬垂直梯子。
为了产生机器人的自主爬升行为,研究人员使用了一个神经网络对其进行训练以爬上梯子。 该行为是针对该特定楼梯创建的,但研究人员计划对该系统进行概括,以使机器人无需事先培训即可爬上新楼梯。
似乎容易
垂直梯子攀爬对于生物四足动物来说是相当具有挑战性的:猫和狗可以做到,尽管你通常看到它们倾斜(靠在某物上)而不是垂直的梯子攀爬。问题在于,梯子的坡度垂直增加得越大,就越需要通过握住梯级来支撑不断增加的重量,而狗和猫等动物没有坚固的抓握系统。
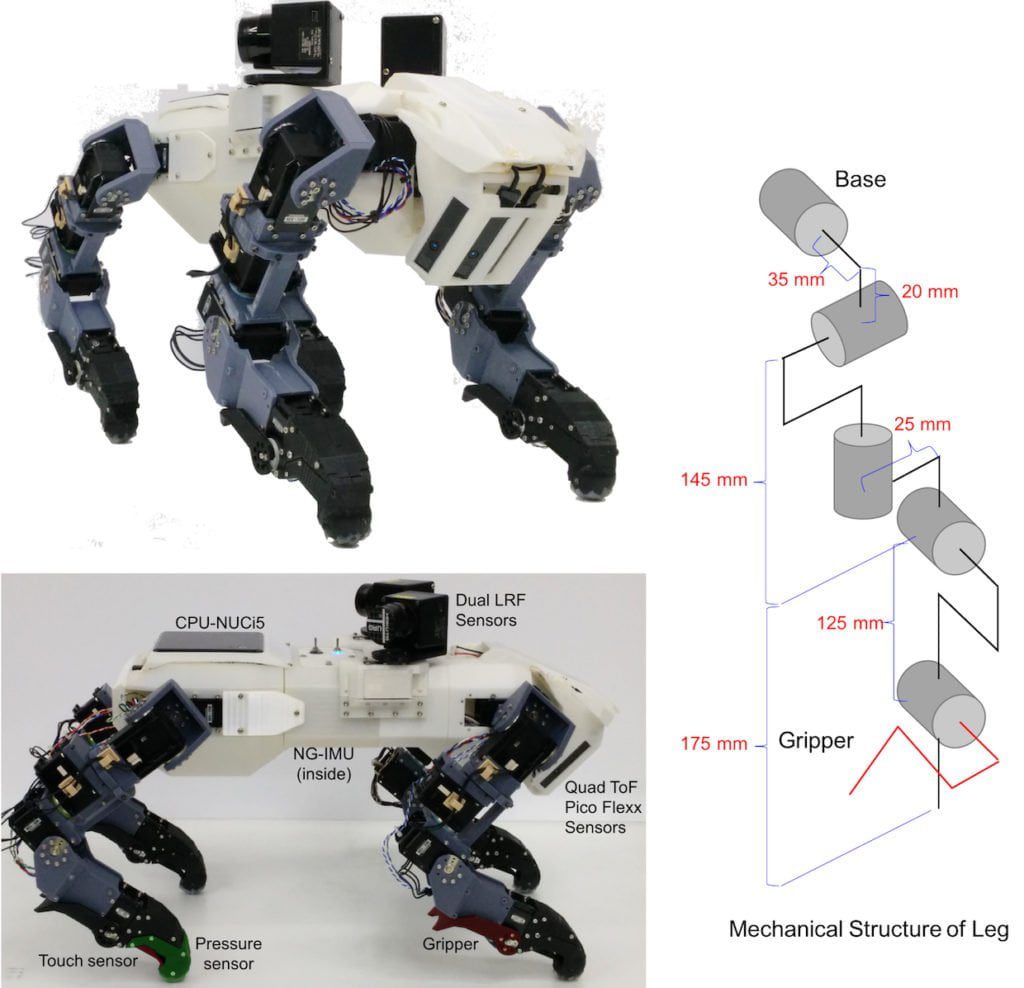
为了爬上梯子,四足机器人的每个爪上都配备了惯性测量单元 (IMU)、3D 摄像头、触觉传感器和压力传感器。
英特尔NUC计算机充当主要控制系统。 Arduino作为辅助控制器来管理内部传感器的输入-输出信号。
大多数四足机器人(与 像ATLAS这样的双足机器人)没有强大的抓握系统,但添加它们似乎是一个值得探索的有前途的想法。
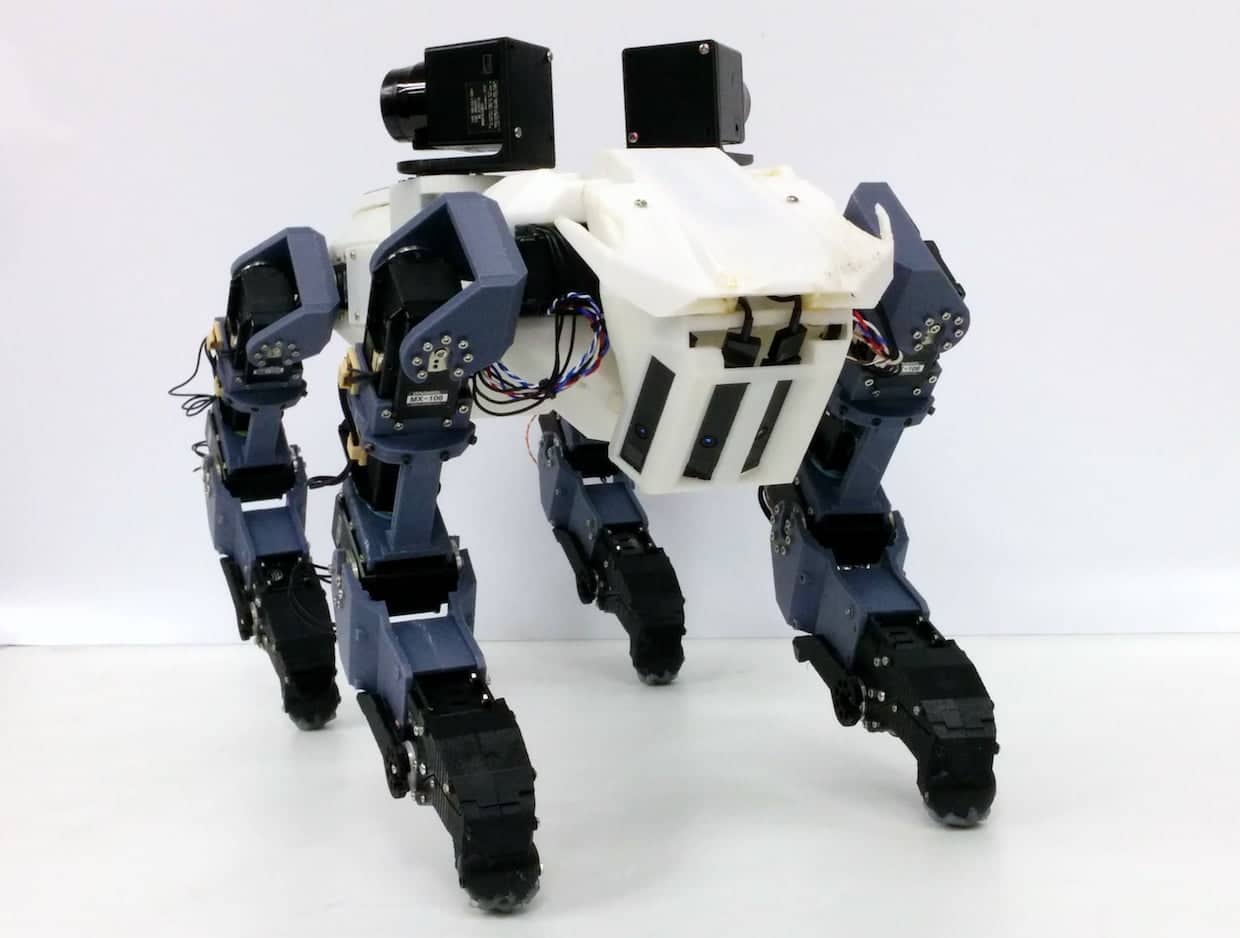
东京城市大学的四足机器人有一种相反的拇指,可以将双腿变成钳子。 正是借助这些夹具,它可以完全自主地在垂直楼梯上攀爬。
“新型”四足机器人无处不在
从梯子到上表面的过渡似乎很难执行。 因此,机器人使用其后腿抓住最高台阶并将其自身推到平台上的方式特别智能。
再多一点,他们就能去任何地方。如果我是你,我就会开始逃跑。
研究“四足机器人在没有支撑的情况下爬上垂直梯子的新能力” 在澳门 IROS 2019 上发表。

