
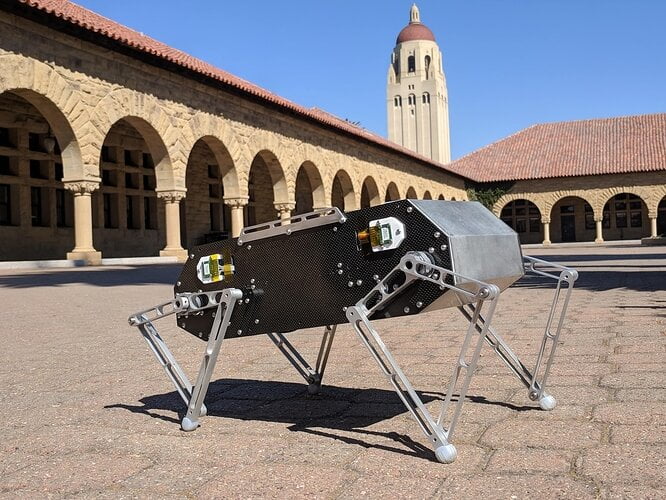
斯坦福大学的机器人专业学生通过致力于创建可以穿越复杂和颠簸场景的机器人,开发出了一种四足机器人,它不仅可以在几乎任何地形上行走,而且可以行走更多:它的名字是狗狗
“我们以前见过这样的模型,但它们都不是开源的。” 骰子 内森考,负责项目的机械工程师。 “Doggo 的伟大之处在于,您可以以相对较低的预算自己建造一个。”
多低
已经在工作中看到的四足机器人(想想现在众所周知的波士顿动力公司的机器人)可能要花费数万或数十万欧元,而其价格约为 3000 欧元(包括零件的制造和运输) “在家”是一个非常受人尊敬的机器人:创建该系统的大型开发人员社区的前景非常具体,能够扩展和改进它。
为了使 Doggo 的项目具有可复制性,学生们从头开始构建它: 这意味着要花更多的精力和时间进行初步研究,但可以从根本上降低成本。
Doggo做什么
实际上,Doggo的动作已经非常熟练:他可以走路,小跑,跳高和跳远,就像他的肉和血的同事一样站着肚子。 它目前只有小猎犬的大小,但是正在研究一种名为斯坦福·伍弗(Stanford Woofer)的较大版本,明天将在加拿大蒙特利尔举行的机器人与自动化国际会议上发表。
“两年前,我们就已经有了创建一个完全开源的四足机器人的想法,在经过多次原型设计之后,我们决定继续使用 Doggo,”该团队的 Natalie Ferrante 解释道。 “第一次看到他走路真是令人兴奋。”有些步骤一开始有点困难,但由于其电机能够每秒计算 8000 次位置,现在它甚至可以在空中跳舞和跳跃(紧紧抓住)一米。
“在某些情况下,这些性能比已经开发的最受欢迎的机器人更好,”Kau 指出。
Doggo现在将做什么?
如果一切按计划进行,Doggo 将标志着四足机器人一定程度扩散的开始。 “我们正在努力构建一个平台,帮助任何人构建这样的机器人,” 骰子 帕特里克·斯莱德,另一位团队成员。 “如果你想在救援领域工作,你可以为 Doggo 配备特定的传感器并编写一些代码,让他能够穿过洞穴或瓦砾。如果你想用它来运输,你可以给它配备一个机械臂或一个容器来收集你想要发送的东西,等等。”
这就是我想象的大规模“机器人化”:友好、具有良好的人为因素和开源。

