
去年XNUMX月,我告诉波士顿动力公司的机器人如何在各种进步中增加了执行例行程序的能力 体操 并在困难的地形上保持平衡。
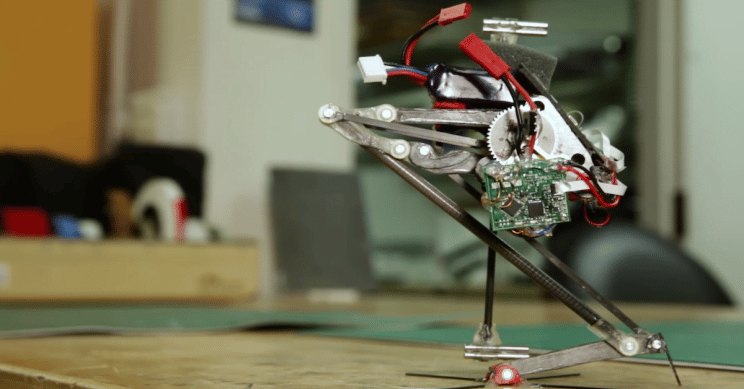
现在,机器人技术有了新进展:加州大学伯克利分校仿生实验室的机器人Salto证明,他可以像奥林匹克运动员一样精准地跳伞。
致波斯王子
Salto自2016年以来一直在加州大学伯克利分校的生物仿制药实验室执业,以完善他的技术。 他跳了一些,走了一些路。 在他第一次跳起两年后的2018年,他已经离地一米了。 从静止状态跳下来,直行直行,就像老波斯王子的平台游戏一样。
只有一个小问题:萨尔托无法着陆。 这不是一个小问题,这意味着他令人印象深刻的跳跃总是以机器人像没落地的花样滑冰运动员一样躺在地板上而结束。
Salto研究人员的负责人解释了这个问题, 贾斯汀·严。 那是当跳投者以一定角度降落时, “它们的下落运动可以通过巨大的角动量来传递”.
现在像体操运动员一样着陆
体操运动员通过迈出一步来保持平衡来解决角动量问题。 Salto无法做到这一点,原因很简单:Salto只有一条腿。
萨尔托转过身来
为此,“萨尔托的着陆角度必须非常精确,否则角动量太大,无法防止反作用轮拖尾,”他解释道 任某。 “从1米高处坠落,萨尔托要想落地不摔倒,只有2.3度的前后移动空间。”
加州大学伯克利分校团队对他们的 Salto 机器人进行了编程,使其扭转反作用轮的尾部,就像落在横梁或壁架上的人在无法向前迈出一步时旋转手臂以保持平衡一样。
在 60 次跳跃的测试中,萨尔托只摔倒了 52 次,“脚后跟”坐了 XNUMX 次,并完美控制着地 XNUMX 次。
可以帮助伯克利团队实现实际目标的精度:制造能够穿越困难地形并帮助人类执行搜索和救援任务的机器人。

