
根据 国家海洋和大气组织,尚待探索的海洋部分超过80%。在我们感到真正满意之前,我们还有数公里的地表需要了解和绘制。
然而,海洋探索并不像看上去那么简单。
仅靠船只来完成这样的工作太慢且成本太高。他们需要额外的帮助,需要一个可以依靠的盟友来探索广阔的蓝色。
这就是技术发挥作用的地方,水生机器人的生产能够深入海底,控制海洋及其所有秘密。
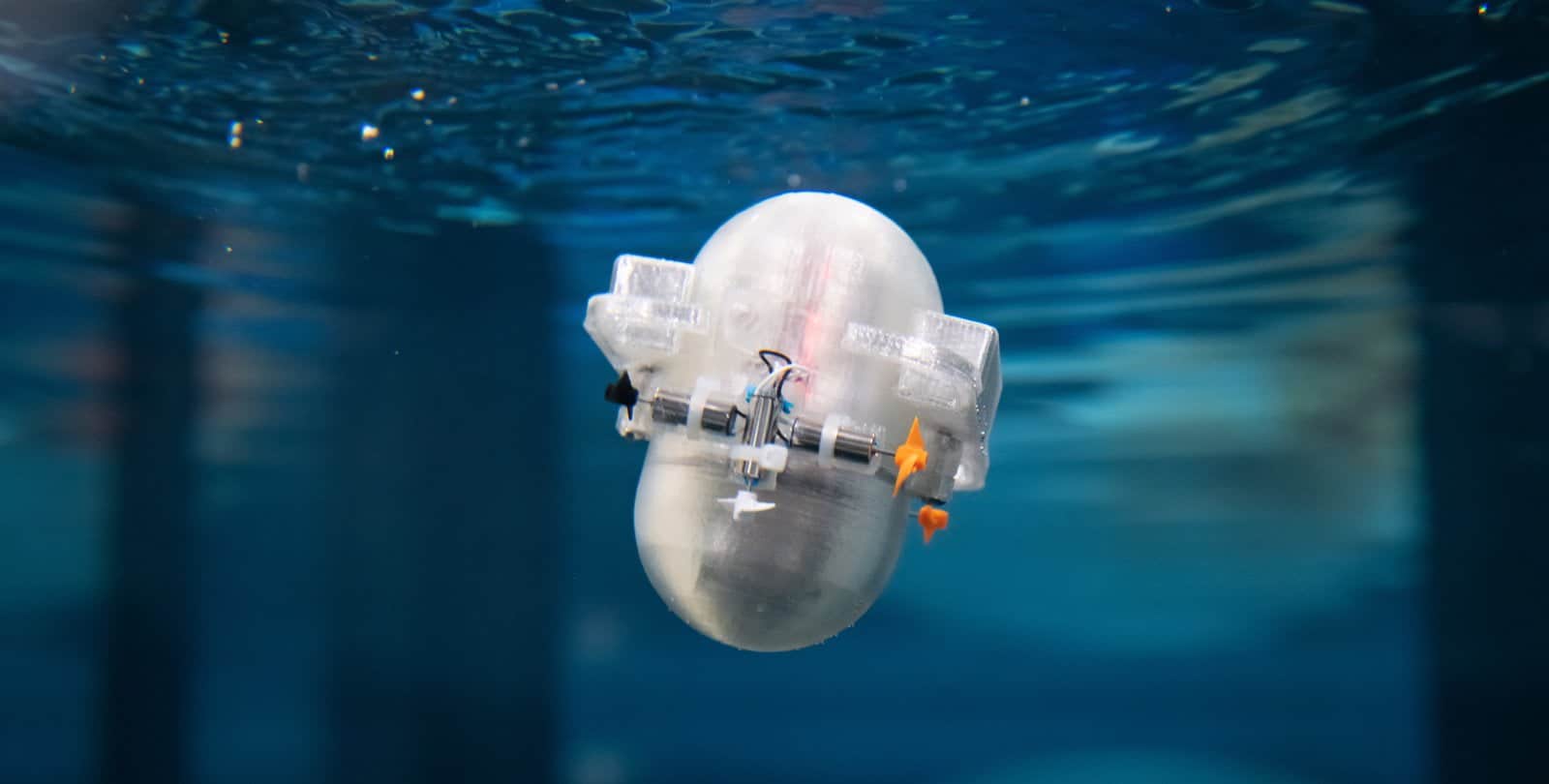
这是他的信仰 约翰·O·达比里,加州理工学院航空与机械工程教授。 他的团队的项目导致创建 卡尔博特 (加州理工学院自主强化学习机器人),一种水上机器人,不过是一只手。
CARL 由内部微处理器供电,使其能够自由移动并记录其观察到的一切。一种可以深入海洋最未知深度的微型相机,为科学家提供了可以利用的工具。
CARL 的记忆及其功能
CARL水上机器人的发明归功于加州理工学院的研究生 彼得·冈纳森,它是在 Dabiri 实验室内生产的。
目前,CARL 正在接受一些小的改变。重要的是,他能够在不需要外部控制的情况下自行确定方向并在海洋中航行。
Gunnarson 向计算机科学家寻求帮助 彼得罗斯·库穆萨科斯该公司成功地为 CARL 开发了人工智能算法,有可能教会它根据环境的变化和过去的经验进行自我定位。
自然通讯 仅在本周发表了他们的研究,展示了该项目的非凡性质。
Koumoutsakos 开发的算法利用了机器人的记忆,即它的“记忆”。正如达比里所证实的那样,其目标是“使用此信息来决定将来如何处理相同的情况=
实验室仍在全面展开,科学家们正试图弄清楚 CARL 是否真的能完成这项工作。
下面是加州理工学院留下的关于该项目的介绍。
为了进行不同的测试,该团队将 CARL 放置在一个坦克内,并配备能够产生水平水流的小型喷射器以进行导航。
在测试过程中,我们还将负责调节和减轻负载 传感器 通过卡尔。
当机器人配备了工具,例如 激光雷达 或相机,在需要更换电池之前在海洋中停留很长时间的能力变得相当有限。通过减轻传感器的负载,研究人员将能够增加 CARL 的使用时间并获得更好的结果。
探索海洋的“仿生水母”项目
CARL 的软件由于其令人难以置信的复杂性,可以充当其他创新项目的“先驱”。
去年,达比里的小组(仍然是同一小组)发表了关于使用电击来控制机器人运动的研究。 水母 .
添加类似于 CARL 的芯片将使研究人员能够更好地引导水母穿过海洋。
与机器人不同,水母没有深度限制,它们几乎可以到达任何地方。
CARL只是一个更大项目的开始,该项目将使我们能够密切观察海面的每个角落。 Dabiri 的愿景是伟大而热情的,我们只需要等待下一次更新。
你能想象未来的某一天,10.000 个或 XNUMX 万个 CARL(我想我们会给它们起不同的名字)全部进入海洋来测量我们今天无法同时访问的区域,以便获得时间- 海洋如何变化的解析图像。 (……)这对于气候预测建模非常重要,而且对于了解海洋如何运作也非常重要。

