
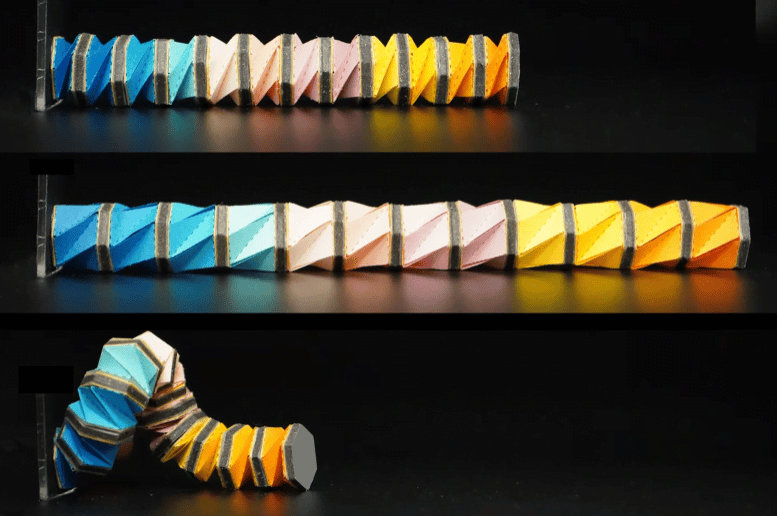
在其细长的形式下,这个机械臂看起来像一个手风琴,可以有效地扩展和折叠起来,用于一千次应用。
这种设计在一项新研究中详细说明 发表在 PNAS 杂志上,受到章鱼触手的启发,模仿它拉伸、扭曲和操纵物体的方式。它的创建者希望它可以集成到生物医学应用中,以协助侵入性手术或操作,例如通过口腔插入呼吸管或应用导管。
“章鱼的神经系统位于它的触手中,”他说 赵瑞克,斯坦福大学机械工程助理教授,新论文的作者。
我们在这里所做的是模仿他高度智能的手臂系统。 因为章鱼的触手是如此多才多艺,它们可以有成百上千的不同动作来与物体互动。
赵瑞克斯坦福大学
受章鱼启发的新型机械臂是如何制造的
新型机械臂的灵活性归功于一些关键特征,包括由磁场而非电机驱动的运动、受折纸启发的面板和柔软的外骨骼。
“折纸”章鱼
一系列微小的部分构成了这个的单臂 软机器人。每个部分内部都有两块六边形软硅胶板,在倾斜的塑料面板中嵌入磁性颗粒,设计有折纸图案 克莱斯林,一种可以扭曲拉伸和收缩的折纸样式。 面板的形状允许手臂伸入管状或收缩成压缩形态,就像章鱼的触手一样。
由于整个手臂上都有磁化板,机器人章鱼可以使用强磁场进行远程操作,有点像 MRI 扫描仪内部产生的磁场。在测试阶段,研究人员使用电磁线圈在手臂周围创建三维磁场。通过调整手臂周围的磁场方向,他们能够引导单个折纸单元的移动和变形。该设计还允许研究人员独立控制手臂的每个部分以微调运动。
通过控制外部磁场,我们可以控制伸长、弯曲等组合。 我们可以检查章鱼机器人开始弯曲的确切点。
赵瑞克斯坦福大学
非凡的多功能性
可以自定义手臂中的所有内容,从磁化强度到尺寸,再到制成的材料,再到制成的单元数。
获得无需电机即可移动的机器人的能力绝对是令人难以置信的因素。 它可以让您真正将整个“章鱼”机器人系统的体积缩小到最小,并显着增加可能的应用。

